
步進(jìn)電機(jī)三種驅(qū)動(dòng)方式的優(yōu)缺點(diǎn)分析
2017-07-24 15:58:09閱讀量:16590來(lái)源:立創(chuàng)商城
步進(jìn)電動(dòng)機(jī)是一種把電脈沖信號(hào)轉(zhuǎn)換成機(jī)械角位移的控制電機(jī),常作為數(shù)字控制系統(tǒng)中的執(zhí)行元件。當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(這個(gè)角度叫做歩距角)。
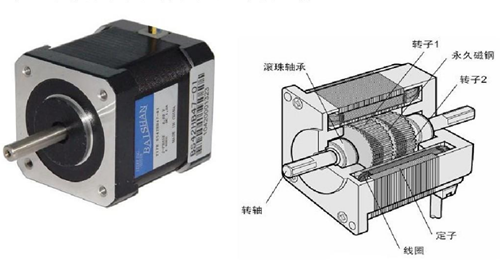
正常運(yùn)動(dòng)情況下,它每轉(zhuǎn)一周具有固定的步數(shù);做連續(xù)步進(jìn)運(yùn)動(dòng)時(shí),其旋轉(zhuǎn)轉(zhuǎn)速與輸入脈沖的頻率保持嚴(yán)格的對(duì)應(yīng)關(guān)系,不受電壓波動(dòng)和負(fù)載變化的影響。
步進(jìn)電動(dòng)機(jī)的分類(lèi):
目前常用的有三種步進(jìn)電動(dòng)機(jī):
反應(yīng)式步進(jìn)電動(dòng)機(jī)(VR):反應(yīng)式步進(jìn)電動(dòng)機(jī)結(jié)構(gòu)簡(jiǎn)單,生產(chǎn)成本低,步距角小;但動(dòng)態(tài)性能差。
永磁式步進(jìn)電動(dòng)機(jī)(PM):永磁式步進(jìn)電動(dòng)機(jī)出力大,動(dòng)態(tài)性能好;但步距角大。
混合式步進(jìn)電動(dòng)機(jī)(HB):混合式步進(jìn)電動(dòng)機(jī)綜合了反應(yīng)式、永磁式步進(jìn)電動(dòng)機(jī)兩者的優(yōu)點(diǎn),它的步距角小,出力大,動(dòng)態(tài)性能好,是目前性能最高的步進(jìn)電動(dòng)機(jī)。它有時(shí)也稱(chēng)作永磁感應(yīng)子式步進(jìn)電動(dòng)機(jī)。
步進(jìn)電機(jī)的驅(qū)動(dòng)方式:
眾所周知,步進(jìn)電機(jī)的驅(qū)動(dòng)方式有整步,半步,細(xì)分驅(qū)動(dòng)。三者既有區(qū)別又有聯(lián)系,目前,市面上很多驅(qū)動(dòng)器支持細(xì)分驅(qū)動(dòng)方式。今天我們來(lái)詳細(xì)分析一下這三種驅(qū)動(dòng)方式的工作原理,及各自的優(yōu)劣勢(shì)。
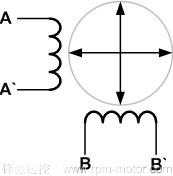
如下圖是兩相步進(jìn)電機(jī)的內(nèi)部定子示意圖,為了使電機(jī)的轉(zhuǎn)子能夠連續(xù)、平穩(wěn)地轉(zhuǎn)動(dòng),定子必須產(chǎn)生一個(gè)連續(xù)、平均的磁場(chǎng)。因?yàn)閺暮暧^上看,電機(jī)轉(zhuǎn)子始終跟隨電機(jī)定子合成的磁場(chǎng)方向。如果定子合成的磁場(chǎng)變化太快,轉(zhuǎn)子跟隨不上,這時(shí)步進(jìn)電機(jī)就出現(xiàn)失步現(xiàn)象。

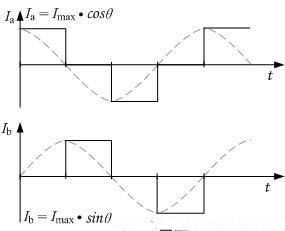
既然電機(jī)轉(zhuǎn)子是跟隨電機(jī)定子磁場(chǎng)轉(zhuǎn)動(dòng),而電機(jī)定子磁場(chǎng)的強(qiáng)度和方向是由定子合成電流決定且成正比。即只要控制電機(jī)的定子電流,則可以達(dá)到驅(qū)動(dòng)電機(jī)的目的。下圖是兩相步進(jìn)電機(jī)的電流合成示意圖。其中Ia是由A-A`相產(chǎn)生,Ib是由B-B`相產(chǎn)生,它們兩個(gè)合成后產(chǎn)生的電流I就是電機(jī)定子的合成電流,它可以代表電機(jī)定子產(chǎn)生磁場(chǎng)的大小和方向。

基于以上步進(jìn)電機(jī)的背景描述,對(duì)于步進(jìn)電機(jī)的整步、半步、細(xì)分的三種驅(qū)動(dòng)方式,都會(huì)是同一種方法,只是電流把一個(gè)圓(360°)分割的粗細(xì)程度不同。
1.整步驅(qū)動(dòng)
對(duì)于整步驅(qū)動(dòng)方式,電機(jī)是走一個(gè)整步,如對(duì)于一個(gè)步進(jìn)角是3.6°的步進(jìn)電機(jī),整步驅(qū)動(dòng)是每走一步是走3.6°。
下圖是整步驅(qū)動(dòng)方式中,電機(jī)定子的電流次序示意圖:

由上圖可知,整步驅(qū)動(dòng)每一時(shí)刻只有一個(gè)相通電,所以這種驅(qū)動(dòng)方式的驅(qū)動(dòng)電路可以是很簡(jiǎn)單,程序代碼也是相對(duì)容易實(shí)現(xiàn),且由上圖可以得到電機(jī)整步驅(qū)動(dòng)相序如下:
BB’→A’A→B’B→AA’→BB’
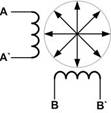
下圖是這種驅(qū)動(dòng)方式的電流矢量分割圖:
可見(jiàn),整步驅(qū)動(dòng)方式的電流矢量把一個(gè)圓平均分割成四份。
下圖是整步驅(qū)動(dòng)方式的A、B相的電流I vs T圖:
總結(jié):
可以看出,整步驅(qū)動(dòng)的缺點(diǎn):描出的正弦波是粗糙的。使用這種方式驅(qū)動(dòng)步進(jìn)電機(jī),低速時(shí)電機(jī)會(huì)抖動(dòng),噪聲會(huì)比較大。但是,這種驅(qū)動(dòng)方式的優(yōu)點(diǎn):無(wú)論在硬件或軟件上都是相對(duì)簡(jiǎn)單,從而驅(qū)動(dòng)器制造成本容易得到控制。
2.半步驅(qū)動(dòng)
對(duì)于半步驅(qū)動(dòng)方式,電機(jī)是走一個(gè)半步,如對(duì)于一個(gè)步進(jìn)角是3.6°的步進(jìn)電機(jī),半步驅(qū)動(dòng)是每走一步,是走1.8°(3.6°/2)。
下圖是半步驅(qū)動(dòng)方式中,電機(jī)定子的電流次序示意圖:

由上圖可見(jiàn),半步驅(qū)動(dòng)方式的比整步驅(qū)動(dòng)方式相對(duì)復(fù)雜一些,在同一時(shí)刻,可能兩個(gè)相都需要被通電,如果要求電機(jī)轉(zhuǎn)動(dòng)的力矩平穩(wěn),則需要在兩相同時(shí)通電時(shí),通電電流應(yīng)該為單相通電電流的sin(45°),即√2/2。當(dāng)然,可以直接通以和單相通電流相等的電流,結(jié)果是電機(jī)轉(zhuǎn)動(dòng)過(guò)程中的力矩不恒定,但它帶來(lái)的好處是驅(qū)動(dòng)電路或軟件編寫(xiě)的簡(jiǎn)化。
以下是這種的驅(qū)動(dòng)方式的驅(qū)動(dòng)相序:
BB’→BB’ A’A→A’A→B’B A’A→ B’B→B’B AA’→AA’→ AA’ BB’
如果需要反轉(zhuǎn),只需按以上相序的逆向進(jìn)行通電即可。
當(dāng)按以上相序?qū)﹄姍C(jī)通電,產(chǎn)生的電流矢量則可以把一個(gè)圓分割成8份,如下圖所示:
半步驅(qū)動(dòng)一方面使電機(jī)的步進(jìn)分辨率提高了一倍,且電機(jī)運(yùn)轉(zhuǎn)會(huì)更為平穩(wěn)。
對(duì)比地,半步驅(qū)動(dòng)方式的兩相電流圖如下圖所示:

總結(jié):
由上圖看出,半步驅(qū)動(dòng)方式的優(yōu)點(diǎn):描出的正弦波較之整步驅(qū)動(dòng)方式,有了改觀,提高了精度。這樣的好處是在無(wú)需更改電機(jī)的情況下,電機(jī)的步進(jìn)角分辨率提高了一倍,且電機(jī)運(yùn)行相對(duì)安靜一些。
3.細(xì)分驅(qū)動(dòng)
如下圖,可以看出某種規(guī)律:
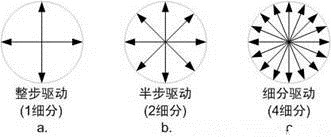
看上圖,電流矢量分割圓越來(lái)越稠密,如上圖的c。這是4細(xì)分驅(qū)動(dòng)的分割圖,從宏觀上可想象,電機(jī)轉(zhuǎn)子走一步的角度將會(huì)隨著細(xì)分?jǐn)?shù)的增加而減小,電機(jī)轉(zhuǎn)動(dòng)也越來(lái)越平穩(wěn)、安靜。從某種意義上,整步和半步驅(qū)動(dòng)也是細(xì)分驅(qū)動(dòng)的一樣,它們的關(guān)系就如正方形和長(zhǎng)方形的關(guān)系。
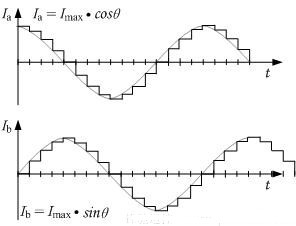
上圖是4細(xì)分驅(qū)動(dòng)方式的兩相電流圖,由圖看出,這時(shí)每相電流的曲線較半步驅(qū)動(dòng)時(shí)的電流曲線更加細(xì)膩。
電流細(xì)分是細(xì)分驅(qū)動(dòng)的其中一種方法,恒流的實(shí)現(xiàn)常用斬波驅(qū)動(dòng),給定的電流是以正弦波分布。另一種為電壓細(xì)分,這種方法是比正弦波的電壓驅(qū)動(dòng)電機(jī)的線圈,可以不需要反饋地實(shí)現(xiàn)電機(jī)的細(xì)分驅(qū)動(dòng),但是由于電機(jī)的反電勢(shì)等的作用,正弦波電壓驅(qū)動(dòng)并不能產(chǎn)生正弦波的電流,效果沒(méi)有電流細(xì)分好,但是它的驅(qū)動(dòng)電路相對(duì)簡(jiǎn)單。
總結(jié):
細(xì)分可以提高電機(jī)的步進(jìn)角分辨率,但是,這并不是細(xì)分驅(qū)動(dòng)的初衷,而是為了減緩步進(jìn)電機(jī)運(yùn)轉(zhuǎn)過(guò)程的震動(dòng)和噪聲,使電機(jī)的力矩輸出更平穩(wěn)。這有點(diǎn)像數(shù)碼相機(jī)的光學(xué)變焦和數(shù)字變焦的關(guān)系,提高步進(jìn)系統(tǒng)分辨率最好依靠電機(jī)本身和機(jī)械結(jié)構(gòu)。
在工程應(yīng)用中,電機(jī)的細(xì)分?jǐn)?shù)可能不同,在低速時(shí),可增大細(xì)分?jǐn)?shù),當(dāng)速度增加時(shí),減少細(xì)分?jǐn)?shù)。



| LM1117IMPX-3.3/NOPB/線性穩(wěn)壓器(LDO) | 0.7147 | |
| DRV8874PWPR/有刷直流電機(jī)驅(qū)動(dòng)芯片 | 3.45 | |
| LM358BIDR/運(yùn)算放大器 | 0.35 | |
| LMR33630ADDAR/DC-DC電源芯片 | 2.01 | |
| LM5164DDAR/DC-DC電源芯片 | 3.19 | |
| ADS1299IPAGR/模擬前端(AFE) | 222.43 | |
| TPS82130SILR/DC-DC電源模塊 | 6.13 | |
| TPL5010DDCR/定時(shí)器/計(jì)時(shí)器 | 1.0884 | |
| LM27762DSSR/電荷泵 | 3.11 | |
| TLV9062IDR/運(yùn)算放大器 | 0.3242 |
- 看!我家的狗,真的能后空翻……
- 2nm 良率超90%!
- 從IoT到電器設(shè)備:乾能惠QN7533如何以“小身材”支撐高可靠電源需求
- 德鴻感應(yīng):小電感,大智慧,從細(xì)微處改變世界
- 戶(hù)用儲(chǔ)能80-1000VDC超寬輸入電源:GH75-CNxx
- T-BOX 硬件方案:STM32+SD NAND(貼片式TF卡)搭配
- 解鎖電池適配新體驗(yàn)!美陽(yáng)電池座品質(zhì)穩(wěn)如磐石
- 川土微:推出高性能、高集成度、低成本的隔離485收發(fā)器
- AMD收購(gòu)硅光子團(tuán)隊(duì),加速AI芯片光互連布局
- 1G視頻2S傳輸!手搓USB3.2拓展塢!開(kāi)源了