
力覺傳感器分類和選擇
2021-06-08 17:59:37閱讀量:975
力覺傳感器分類
所謂力覺是指機(jī)器人作業(yè)過程中對來自外部的力的感知,它和壓覺不同,壓覺力是垂直于力接觸表面的力、三維力和三維力矩的感知。機(jī)器人力覺傳感器是模仿人類四肢關(guān)節(jié)功能的機(jī)器人獲得實(shí)際操作時的大部分力信息的裝置,是機(jī)器人主動柔順控制必不可少的,它直接影響著機(jī)器人的力控制性能。分辨率、靈敏度和線性度高,可靠性好,抗干擾能力強(qiáng)是機(jī)器人力覺傳感器的主要性能要求。就傳感器安裝部位麗言,力覺傳感器可分為腕力傳感器、關(guān)節(jié)力傳感器、握力傳感器、腳力傳感器、手指力覺傳感器等。~
腕力傳感器
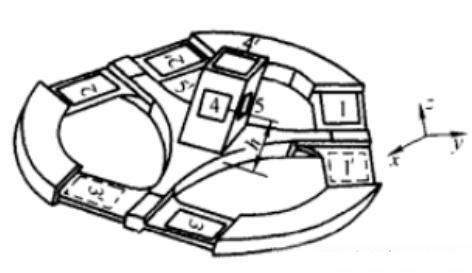
腕力傳感器是一個兩端分別與機(jī)器人腕部和手爪相聯(lián)接的力覺傳感器。當(dāng)機(jī)械手夾住工件進(jìn)行操作時,通過腕力傳感器可以輸出六維(三維力和三維力矩)分量反饋給機(jī)器人控制系統(tǒng),以控制或調(diào)節(jié)機(jī)械手的運(yùn)動,完成所要求的作業(yè)。腕力傳感器分為問接輸出型和直接輸出型兩種。間接輸出型腕力傳感器敏感體本身的結(jié)構(gòu)比較簡單,但需對傳感器進(jìn)行校準(zhǔn),要經(jīng)過復(fù)雜的計(jì)算求出傳遞矩陣系數(shù),使用時進(jìn)行矩陣運(yùn)算后才能提取出六維分量。直接型腕力傳感器敏感體本身的結(jié)構(gòu)比較復(fù)雜,但只需要經(jīng)過簡單的計(jì)算就能提取出6個分量,有的甚至可以直接得到6個分量。
腕力傳感器的系統(tǒng)硬件通常由傳感器和信息處理兩部分組成。傳感器部分由彈性體、測量電橋和前級放大器組成,主要完成敏感六維分量,并進(jìn)行信號前級放大的任務(wù)。信號處理部分包括后級放大、濾波、信號采樣保持、AD轉(zhuǎn)換以及進(jìn)行系統(tǒng)控制、計(jì)算和通信的微機(jī)系統(tǒng),整個系統(tǒng)框圖如圖所示。
腕力傳感器系統(tǒng)軟件一般包括數(shù)據(jù)采集和AD轉(zhuǎn)換控制軟件、非線性校正和矩陣解耦運(yùn)算軟件、系統(tǒng)通信及輸出軟件等。
腕力傳感器的優(yōu)缺點(diǎn):
1.腕力傳感器雖然結(jié)構(gòu)較復(fù)雜,但原理比較類似,一般都是通過應(yīng)變片來測量內(nèi)部彈性體的變形,再解耦求得多維力信號。
2.腕力傳感器獲得的力信息較多(如六維腕力傳感器),分辨率、靈敏度和精度高,可靠性好和使用方便。
3.腕力傳感器對不同類型的機(jī)器人能實(shí)現(xiàn)通用化,所以得到廣泛的應(yīng)用。
4.彈性元件一般為整體結(jié)構(gòu),加工極為困難。
5.應(yīng)變片粘貼過程復(fù)雜,應(yīng)變片的輸出信號較弱,需要高性能的放大器,市場上供應(yīng)的放大器體積較大。
6.從腕力傳感器的工作原理可以看出,腕力傳感器工作時產(chǎn)生的變形必將影響機(jī)器人操作臂的定位精度。
7.由于傳感器設(shè)計(jì)、制造上的原因,使得傳感器的輸出信號與實(shí)際六維向量的分力之間存在相互耦合作用,即傳感器的相互干擾,這種干擾非常復(fù)雜,難以從理論上進(jìn)行分析和解耦消除,通常需要采用實(shí)驗(yàn)方法進(jìn)行標(biāo)定。
握力傳感器
光纖握力覺傳感器單元如圖所示,所用的光纖是50um、125um的多模光纖,波紋板是由兩塊相互嚙合的V形槽板組成,為了保持平衡,在槽的另一端放置一根不通光的虛設(shè)光纖,板的厚度為3mm。當(dāng)物體壓力作用于握力覺傳感器時,波紋板的上蓋相對于下蓋位移,使光纖產(chǎn)生變形,通過測量光信號的衰減可間接得知壓力的大小。在設(shè)計(jì)、制作之后,對系統(tǒng)性能進(jìn)行測試。測量結(jié)果范圍大、靈敏度高、效果良好。力的分辨率為59,測量范圍為0至2500g。系統(tǒng)作為一獨(dú)立的部分,通過串行口與控制微機(jī)相連,接口簡單方便。
腳力傳感器
二足步行機(jī)器人在人類生活的環(huán)境中應(yīng)用較為方便,但不穩(wěn)定,控制較復(fù)雜。為了解步行時的狀態(tài),需裝各種傳感器,其中腳力傳感器是與外界接觸的傳感器,對步行控制來說是相當(dāng)重要的。
手指式力傳感器
所謂力覺是指機(jī)器人作業(yè)過程中對來自外部的力的感知,它和壓覺不同,壓覺力是垂直于力接觸表面的力、三維力和三維力矩的感知。機(jī)器人力覺傳感器是模仿人類四肢關(guān)節(jié)功能的機(jī)器人獲得實(shí)際操作時的大部分力信息的裝置,是機(jī)器人主動柔順控制必不可少的,它直接影響著機(jī)器人的力控制性能。分辨率、靈敏度和線性度高,可靠性好,抗干擾能力強(qiáng)是機(jī)器人力覺傳感器的主要性能要求。就傳感器安裝部位麗言,力覺傳感器可分為腕力傳感器、關(guān)節(jié)力傳感器、握力傳感器、腳力傳感器、手指力覺傳感器等。~
腕力傳感器
腕力傳感器是一個兩端分別與機(jī)器人腕部和手爪相聯(lián)接的力覺傳感器。當(dāng)機(jī)械手夾住工件進(jìn)行操作時,通過腕力傳感器可以輸出六維(三維力和三維力矩)分量反饋給機(jī)器人控制系統(tǒng),以控制或調(diào)節(jié)機(jī)械手的運(yùn)動,完成所要求的作業(yè)。腕力傳感器分為問接輸出型和直接輸出型兩種。間接輸出型腕力傳感器敏感體本身的結(jié)構(gòu)比較簡單,但需對傳感器進(jìn)行校準(zhǔn),要經(jīng)過復(fù)雜的計(jì)算求出傳遞矩陣系數(shù),使用時進(jìn)行矩陣運(yùn)算后才能提取出六維分量。直接型腕力傳感器敏感體本身的結(jié)構(gòu)比較復(fù)雜,但只需要經(jīng)過簡單的計(jì)算就能提取出6個分量,有的甚至可以直接得到6個分量。
腕力傳感器的系統(tǒng)硬件通常由傳感器和信息處理兩部分組成。傳感器部分由彈性體、測量電橋和前級放大器組成,主要完成敏感六維分量,并進(jìn)行信號前級放大的任務(wù)。信號處理部分包括后級放大、濾波、信號采樣保持、AD轉(zhuǎn)換以及進(jìn)行系統(tǒng)控制、計(jì)算和通信的微機(jī)系統(tǒng),整個系統(tǒng)框圖如圖所示。
腕力傳感器系統(tǒng)軟件一般包括數(shù)據(jù)采集和AD轉(zhuǎn)換控制軟件、非線性校正和矩陣解耦運(yùn)算軟件、系統(tǒng)通信及輸出軟件等。
腕力傳感器的優(yōu)缺點(diǎn):
1.腕力傳感器雖然結(jié)構(gòu)較復(fù)雜,但原理比較類似,一般都是通過應(yīng)變片來測量內(nèi)部彈性體的變形,再解耦求得多維力信號。
2.腕力傳感器獲得的力信息較多(如六維腕力傳感器),分辨率、靈敏度和精度高,可靠性好和使用方便。
3.腕力傳感器對不同類型的機(jī)器人能實(shí)現(xiàn)通用化,所以得到廣泛的應(yīng)用。
4.彈性元件一般為整體結(jié)構(gòu),加工極為困難。
5.應(yīng)變片粘貼過程復(fù)雜,應(yīng)變片的輸出信號較弱,需要高性能的放大器,市場上供應(yīng)的放大器體積較大。
6.從腕力傳感器的工作原理可以看出,腕力傳感器工作時產(chǎn)生的變形必將影響機(jī)器人操作臂的定位精度。
7.由于傳感器設(shè)計(jì)、制造上的原因,使得傳感器的輸出信號與實(shí)際六維向量的分力之間存在相互耦合作用,即傳感器的相互干擾,這種干擾非常復(fù)雜,難以從理論上進(jìn)行分析和解耦消除,通常需要采用實(shí)驗(yàn)方法進(jìn)行標(biāo)定。
握力傳感器
光纖握力覺傳感器單元如圖所示,所用的光纖是50um、125um的多模光纖,波紋板是由兩塊相互嚙合的V形槽板組成,為了保持平衡,在槽的另一端放置一根不通光的虛設(shè)光纖,板的厚度為3mm。當(dāng)物體壓力作用于握力覺傳感器時,波紋板的上蓋相對于下蓋位移,使光纖產(chǎn)生變形,通過測量光信號的衰減可間接得知壓力的大小。在設(shè)計(jì)、制作之后,對系統(tǒng)性能進(jìn)行測試。測量結(jié)果范圍大、靈敏度高、效果良好。力的分辨率為59,測量范圍為0至2500g。系統(tǒng)作為一獨(dú)立的部分,通過串行口與控制微機(jī)相連,接口簡單方便。
腳力傳感器
二足步行機(jī)器人在人類生活的環(huán)境中應(yīng)用較為方便,但不穩(wěn)定,控制較復(fù)雜。為了解步行時的狀態(tài),需裝各種傳感器,其中腳力傳感器是與外界接觸的傳感器,對步行控制來說是相當(dāng)重要的。
手指式力傳感器
手指式力傳感器,一般通過應(yīng)變片或壓阻敏感元件測量多維力而產(chǎn)生輸出信號,常用于小范圍作業(yè),如靈巧手抓雞蛋等實(shí)驗(yàn),精度高、可靠性好,漸漸成為力控制研究的一個重要方向,但多指協(xié)調(diào)復(fù)雜。
內(nèi)容聲明:本文轉(zhuǎn)載自其它來源,轉(zhuǎn)載目的在于傳遞更多信息,不代表立創(chuàng)商城贊同其觀點(diǎn)和對其真實(shí)性負(fù)責(zé),僅作學(xué)習(xí)與交流目的使用。



熱門物料
型號
價格
| LM1117IMPX-3.3/NOPB/線性穩(wěn)壓器(LDO) | 0.7147 | |
| DRV8874PWPR/有刷直流電機(jī)驅(qū)動芯片 | 3.45 | |
| LM358BIDR/運(yùn)算放大器 | 0.35 | |
| LMR33630ADDAR/DC-DC電源芯片 | 2.01 | |
| LM5164DDAR/DC-DC電源芯片 | 3.12 | |
| ADS1299IPAGR/模擬前端(AFE) | 222.43 | |
| TPS82130SILR/DC-DC電源模塊 | 6.13 | |
| TPL5010DDCR/定時器/計(jì)時器 | 1.0884 | |
| LM27762DSSR/電荷泵 | 3.11 | |
| TLV9062IDR/運(yùn)算放大器 | 0.3242 |
熱門資訊