
履帶四足復(fù)合機器人
2022-06-10 15:29:11閱讀量:2878
本文作者:立創(chuàng)開源硬件平臺 OSHWHub 用戶@杜邦線丶小戰(zhàn)士,禁止商用,未經(jīng)許可禁止轉(zhuǎn)載,點擊查看原文章
1、項目簡介
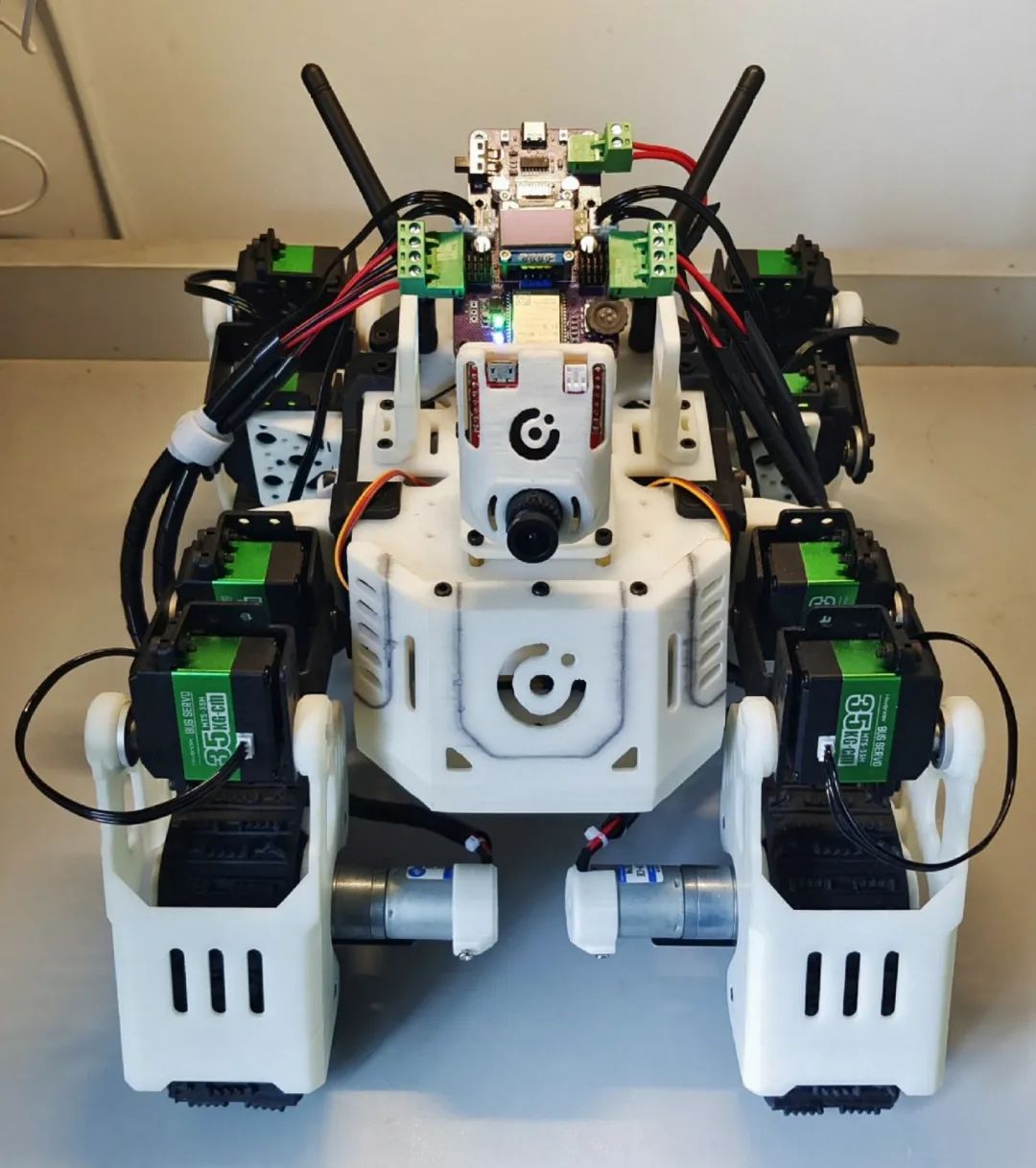
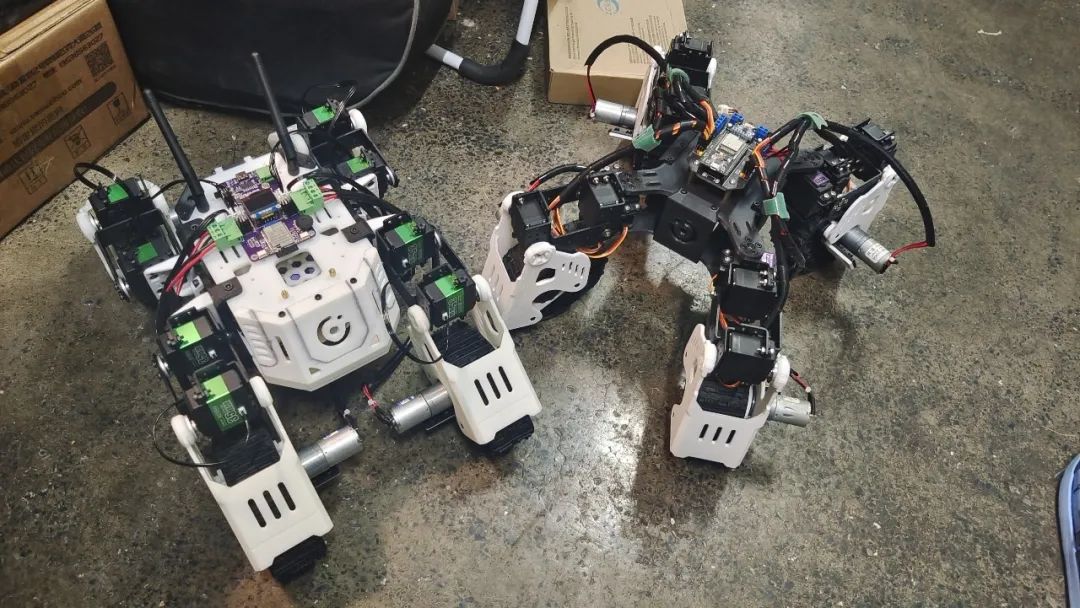
本項目中,履足式復(fù)合機器人擁有兩種行進模式:四足行進模式、履帶行進模式,應(yīng)對不同場景及地形時能夠切換形態(tài)。
四足形態(tài)下整體總共擁有8個自由度DOF,單腿各具備2個自由度DOF,足端結(jié)構(gòu)融入了履帶機構(gòu),各履帶機構(gòu)配備1個直流電機驅(qū)動。
該機器人主控板的MCU模組為ESP32-WROVER-E,能夠?qū)崿F(xiàn)針對總線舵機+PWM舵機+直流電機的控制,同時包括其他硬件資源:六軸加速度傳感器、OLED屏幕接口、RGB燈珠、蜂鳴器等。
履帶車形態(tài)在平坦或稍崎嶇的地貌上能夠保持較高的行進速度,降低了四足爬行的功率消耗;四足形態(tài)用于跨越障礙,靈活應(yīng)對各類復(fù)雜地形環(huán)境,解決了履帶結(jié)構(gòu)應(yīng)對高度落差較大地形難以翻越的痛點,即實現(xiàn)了仿生四足與履帶式結(jié)構(gòu)雙優(yōu)勢結(jié)合的腿履協(xié)同。

02、設(shè)計靈感
最初的構(gòu)想來源——《使命召喚11:高級戰(zhàn)爭》中的“泰坦”重型坦克。


初始草稿
03、電控硬件功能
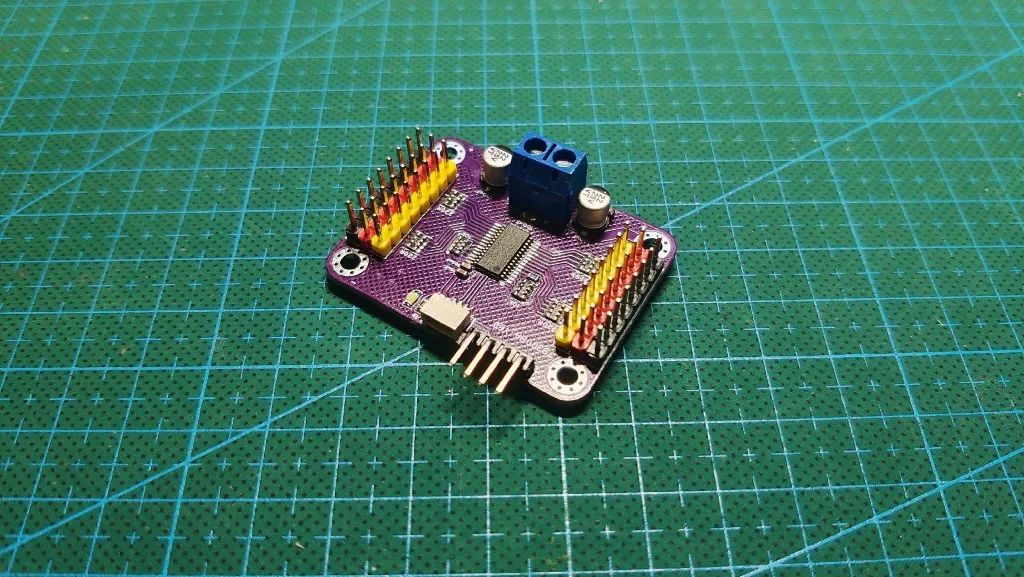
3.1 主控板:
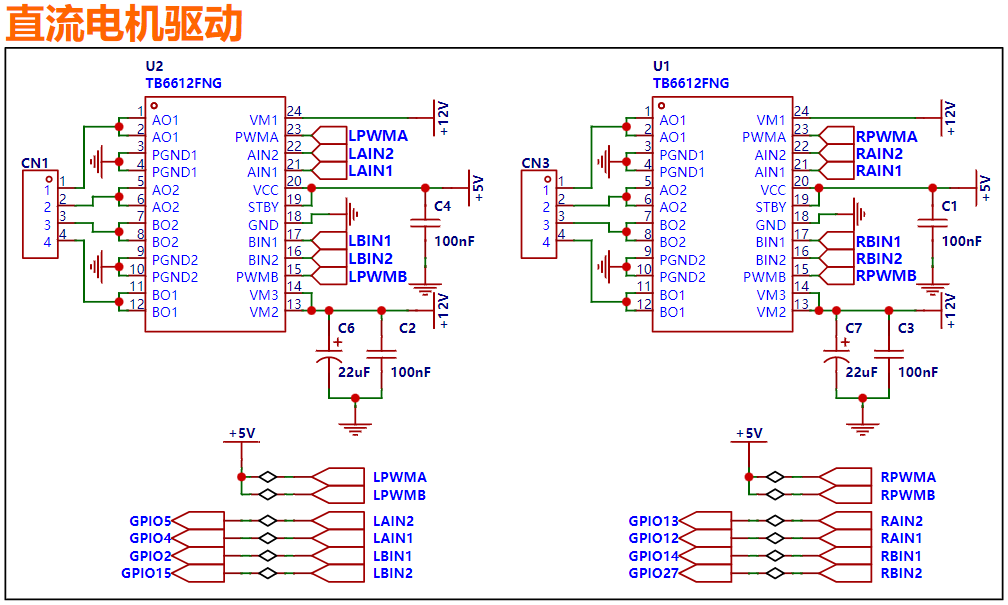
2.1.1 電機驅(qū)動:
-
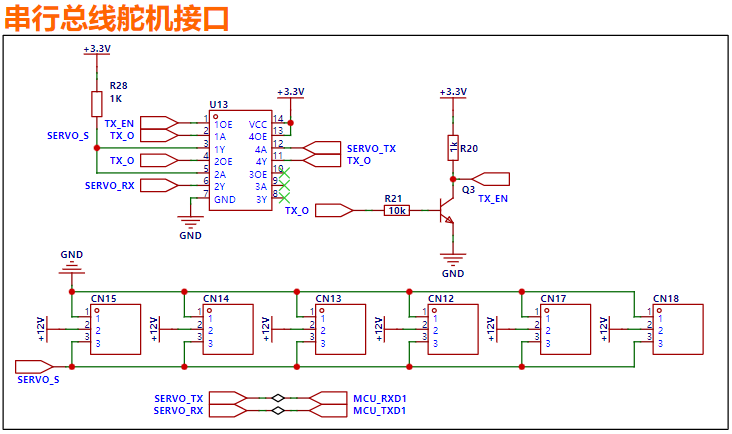
6路串行總線舵機接口:PH2.0-3P,74HC126D
-
4路直流電機驅(qū)動:TB6612FNG
2.1.2 指示器件:
-
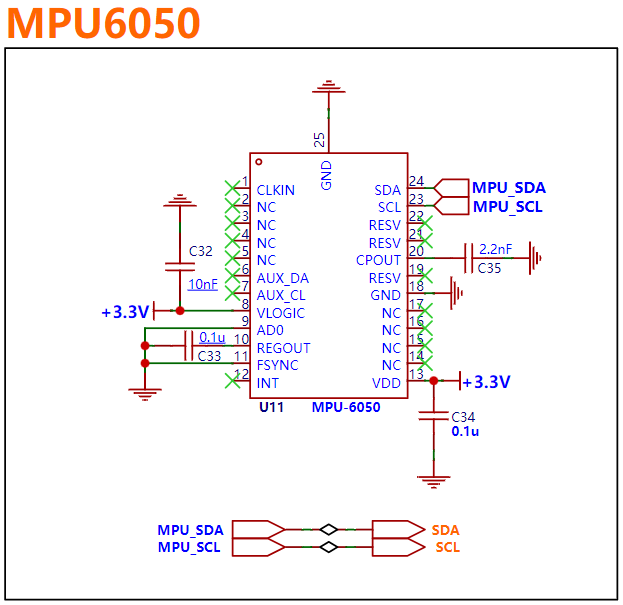
1顆 六軸加速度傳感器:MPU6050
-
1塊 撥輪編碼器:MITSUMI
-
1顆 普普通通的 微型無源蜂鳴器:DET402-G
-
1顆 普普通通的 發(fā)光LED:0603
-
1處 0.96寸4針OLED屏幕接口:HDR-1*4P-F
-
3顆 普普通通的 RGB燈珠:WS2812B-2020
2.1.3 拓展接口:
-
2路拓展IIC接口:PH2.0-4P
-
1路WS2812B燈珠接口:HDR-M-2.54-3P
2.2 拓展板:
-
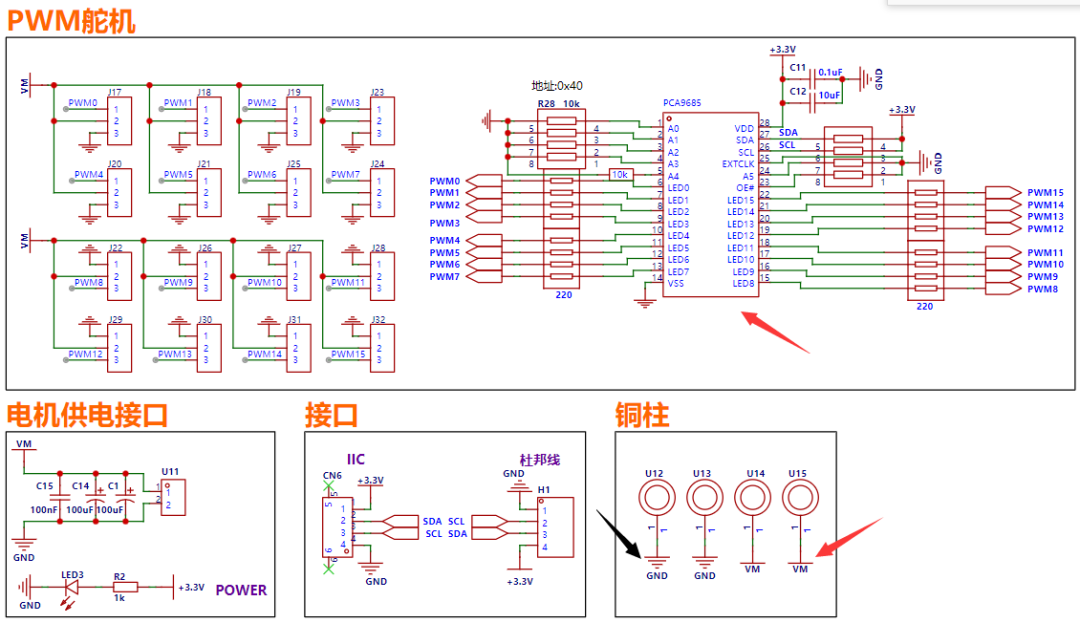
16路PWM舵機驅(qū)動:PCA9685
04、選型簡述
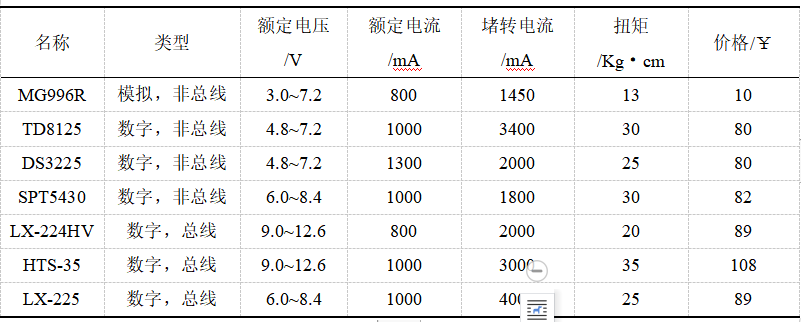
3.1 電機選型:
串行總線舵機選型:型號:HTS-35H,額定電壓:9.0~12.6V,串行通信波特率115200,額定扭矩:35kg.cm/3.5N.m。
通信需要將UART全雙工轉(zhuǎn)半雙工,根據(jù)幻爾舵機商家提供的通信協(xié)議手冊和原理圖,采用74HC126D實現(xiàn)。

PWM舵機選型【經(jīng)濟方案】:型號:MG996R,額定扭矩:13kg.cm/1.3N.m。
常見的大舵機,配合拓展板應(yīng)該也沒什么問題,箭頭處注意供電電壓。(注意供電連接,主控板與拓展板可通過銅柱連接電源)

直流電機選型:型號:JGA25-370-1260,額定電壓:12.0V,減速比:1:103,空載轉(zhuǎn)速:60轉(zhuǎn)/分鐘。
主控V1.0版本中,采用TB6612FNG驅(qū)動【考慮到價格問題,后續(xù)打算用RZ7899/DRV8833替代】。

3.2 其他選型:
六軸加速度傳感器:MPU6050。
通常選擇,源代碼中定義支持了采用DMP獲取四元數(shù)后,再解算得Pitch、Roll角(yaw角太飄),而且QFN封裝可能不太好焊。
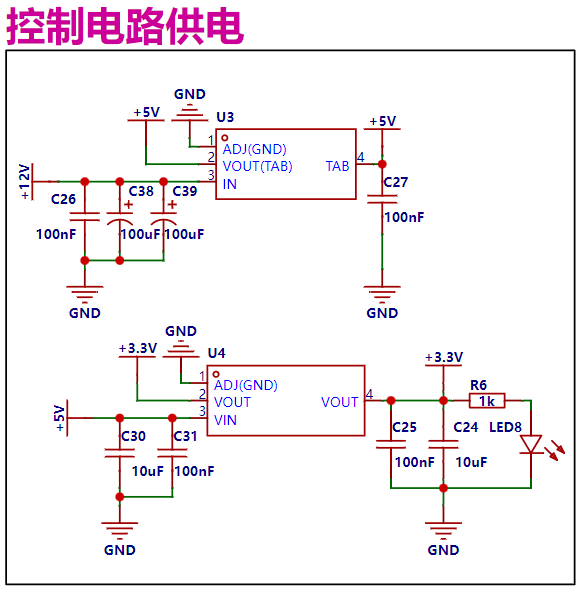
芯片供電:3.3V與5V供電均采用LDO實現(xiàn),即SCJT1117-3.3與SCJT1117-5.0。(由于壓差較大,建議貼散熱片)
電源選型:采用放電倍率35C的3S聚合物航模電機,但考慮到安全問題,經(jīng)測試3節(jié)放電倍率10C的18650動力鋰電池也能驅(qū)動。


航模電池 18650動力鋰電池
05、實物圖片
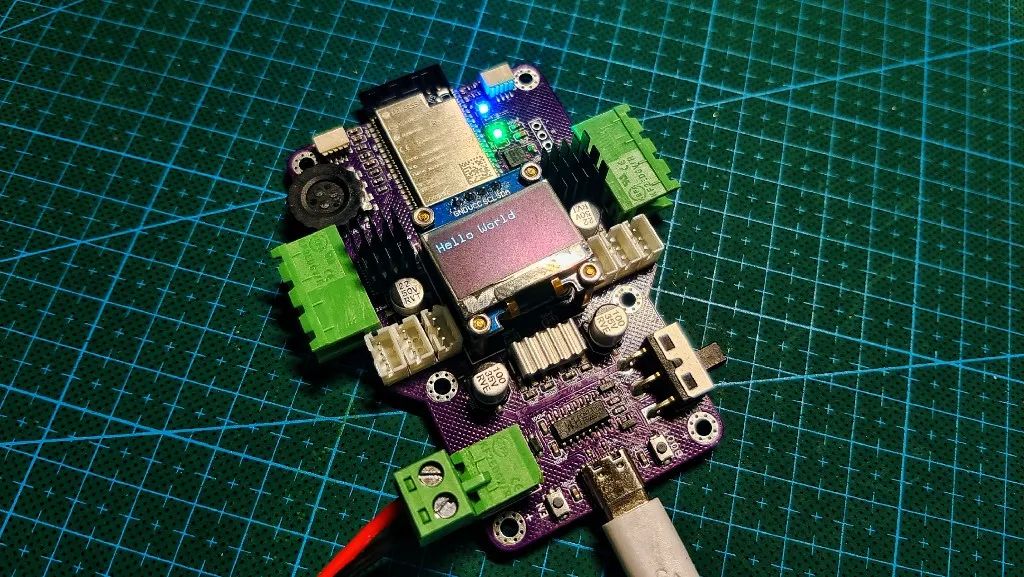
主控板
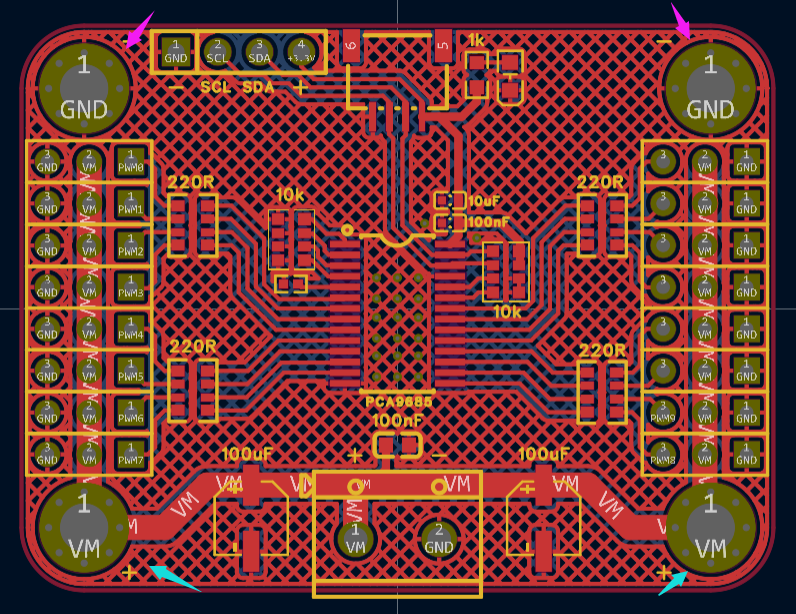
16路PWM舵機---拓展板
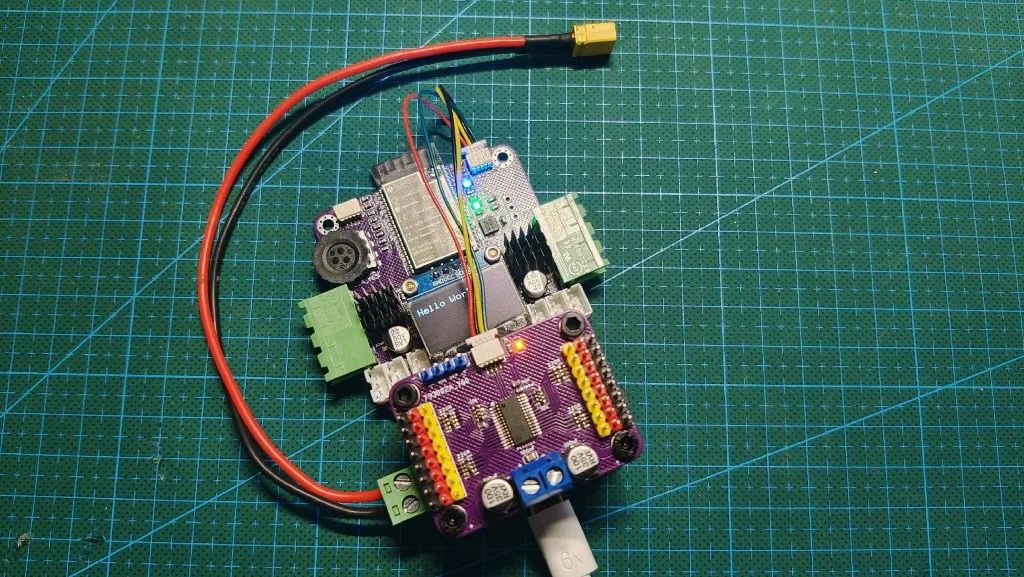
組合圖
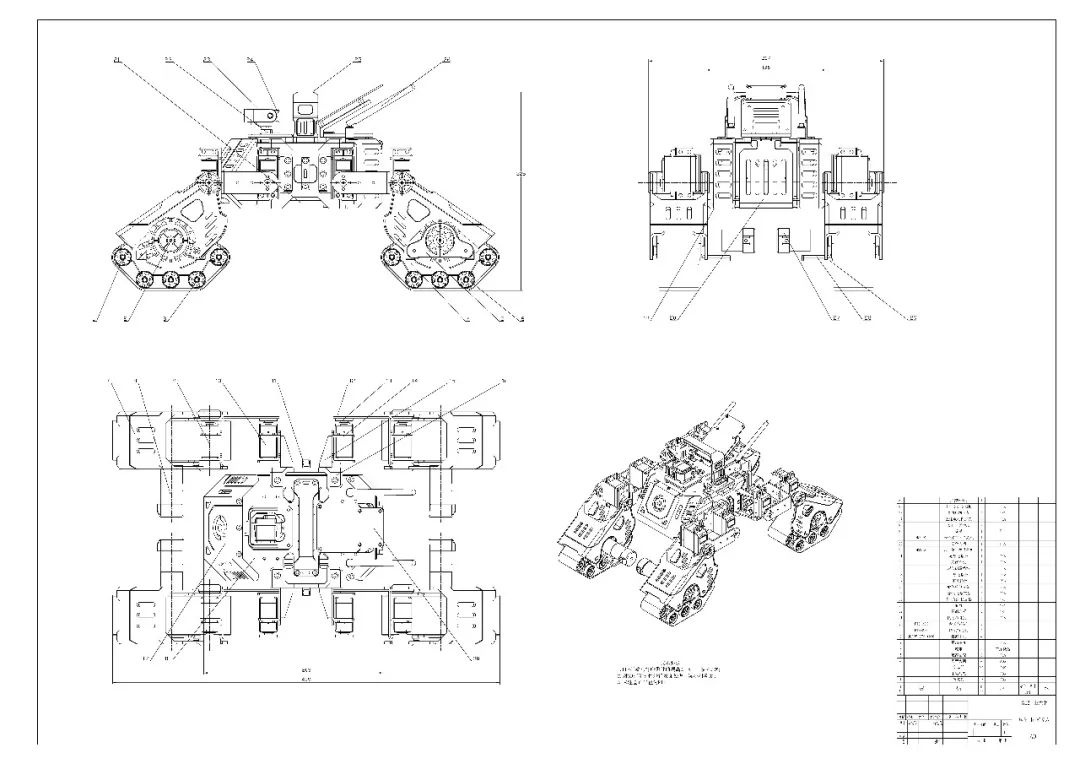
06、機械結(jié)構(gòu)設(shè)計
所述機器人整體總重量(加電源)經(jīng)稱量可達3.0kg。
目前大部分結(jié)構(gòu)零件以FDM式3D打印技術(shù)制造,采用PLA材質(zhì),故主要參數(shù)推薦:0.15mm層高,70%填充。
部分需要少量支撐零件,如履帶外殼——主殼、提手、軀體前側(cè)板等。
設(shè)計特點
-
履帶足
-
二自由度串聯(lián)腿
-
四足形態(tài):8自由度
-
履行模式:4電機驅(qū)動
-
預(yù)留二自由度云臺
-
3D打印結(jié)構(gòu)
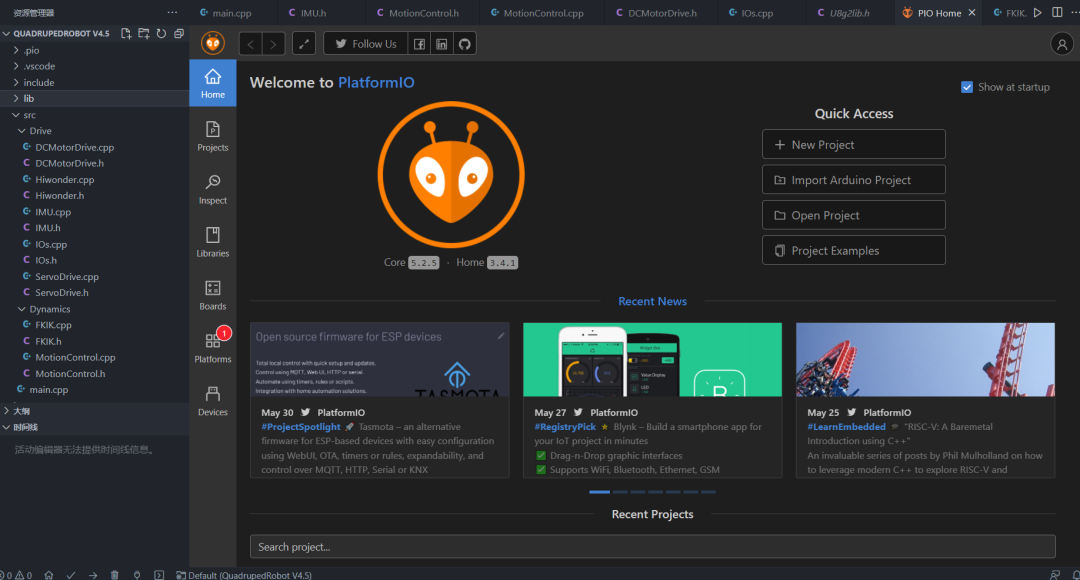
07、控制系統(tǒng)軟件設(shè)計
VSCode+PlatformIO平臺開發(fā),目前機器人主控系統(tǒng)主要包括2部分:底層驅(qū)動,運動控制。
6.1 底層驅(qū)動內(nèi)容:
-
串行總線舵機通信
-
直流電機驅(qū)動
-
六軸加速度傳感器通信
-
OLED屏幕驅(qū)動
-
撥輪編碼器讀取
-
WS2812B-RGB燈珠驅(qū)動
-
蜂鳴器驅(qū)動
-
WiFi通信配置
6.2 運動控制內(nèi)容:
-
單腿正解FK
-
單腿逆解IK
-
姿態(tài)逆解
-
足端擺線軌跡計算
-
Trot步態(tài)模式
-
Walk步態(tài)模式
-
*VMC算法 -- 偽閉環(huán)(待測試)
08、遠程控制App設(shè)計
注意:需要開啟定位、通知權(quán)限
設(shè)計特點
-
基于Android端開發(fā)
-
采用WIFI作為無線通訊模式
-
采用TCP作為傳輸層協(xié)議

09、實物樣機


更多詳情及附件,可從原工程查看。
本文作者:立創(chuàng)開源硬件平臺 OSHWHub 用戶@杜邦線丶小戰(zhàn)士,禁止商用,未經(jīng)許可禁止轉(zhuǎn)載




| L7805CV-DG/線性穩(wěn)壓器(LDO) | 0.5637 | |
| AMS1117-3.3/線性穩(wěn)壓器(LDO) | 0.1237 | |
| BAT54C,215/肖特基二極管 | 0.0334 | |
| LM358DR2G/運算放大器 | 0.35 | |
| CJ431/電壓基準芯片 | 0.1147 | |
| LM393DR2G/比較器 | 0.318 | |
| ADUM4160BRWZ-RL/隔離式USB芯片 | 31.6 | |
| SS8050/三極管(BJT) | 0.035 | |
| 8S005/錫膏/錫漿 | 17.67 | |
| B0505S-1WR3/隔離電源模塊 | 2.34 |